| Rhino Robot
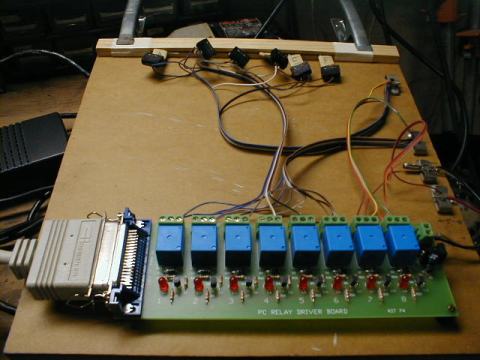
Finally got mine working, with the help of Kit #74 from kitsrus.com, which drives 8 SPDT relays from a signal sent to the parallel port of a computer. I bought the kit from Marlin P. Jones Associates (http://www.mpja.com). I run the DOS version of the provided software on an old Sharp 486 notebook computer. Power for the motors and relay board is from a computer power-supply from Canal Street in NYC.
|
 |
| Relays 1-6 control the 6 robot motors; relays
7 and 8 are activated together and work like a DPDT switch to reverse
the motors. Even though the motors are rated at 12v, I am running
them at 5 so they don't go too fast.
The robot works fine, but I am unable to use the motion detectors to control the exact position. That requires the (expensive) Rhino controller card and proprietary software. It takes some care to manually stop the robot arm before it reaches its limits of motion. Click here for the Hex codes used to control the relays. |
 |
|
Page last modified 06/04/01
|
